
GZTraS (GeoZilla RTCM Transformation Server)
GZTraS is a Windows-based Server for GNSS-Network-Software and provides the functionality
of a so-called transformation modules to provide RTCM 3.1 transformation messages [1].
GZTraS is implemented as a TCP-Server and is able to handle requests based on the NMEA-position
(e.g. $GGA-String) of different Clients. A client may be the Network-Software of a GNSS-Network,
which passes the GNSS-Rover request through to GZtraS (figure 1) or directly a GNSS-Rover.
Different transformation modules represented by configurations (e.g. for a country) can be
handled by GZTraS in order to allow a flexible declaration of the RTCM-transformation-messages
and their data content and message-design.
The present implementation and configuration of GZTraS is due to
DFLBF- and
DFHRS as reference
transformation concepts and datebases. Any other 3D, Plan or Height reference
transformation and database e.g. (Data-Grids, geopotential models, etc.) may be implemented
and configured accordingly to provide the derived RTCM-Message.
The functionality of GZTraS is presently tested out in a diploma thesis.
A Version of GZTraS with a test-client (GZTraC) can be
downloaded here. The reference-transformation
and databases included in the setup are the DFLBF- and DFHBF databases of Bavaria, Germany.
The DFLBF database has a mean accuracy of only 5 to 10 cm as it was computed with
only 150 identical points all over the 300 x 300 km area of Bavaria. The DFHBF
database has a mean height accuracy of 1 cm. An overview on already available
transformation databases can be found at
http://www.ib-seiler.de
and at http://www.dfhbf.de.
The Source-Code of the test-client can be handed out in case of interest.
Further Information: See Literature
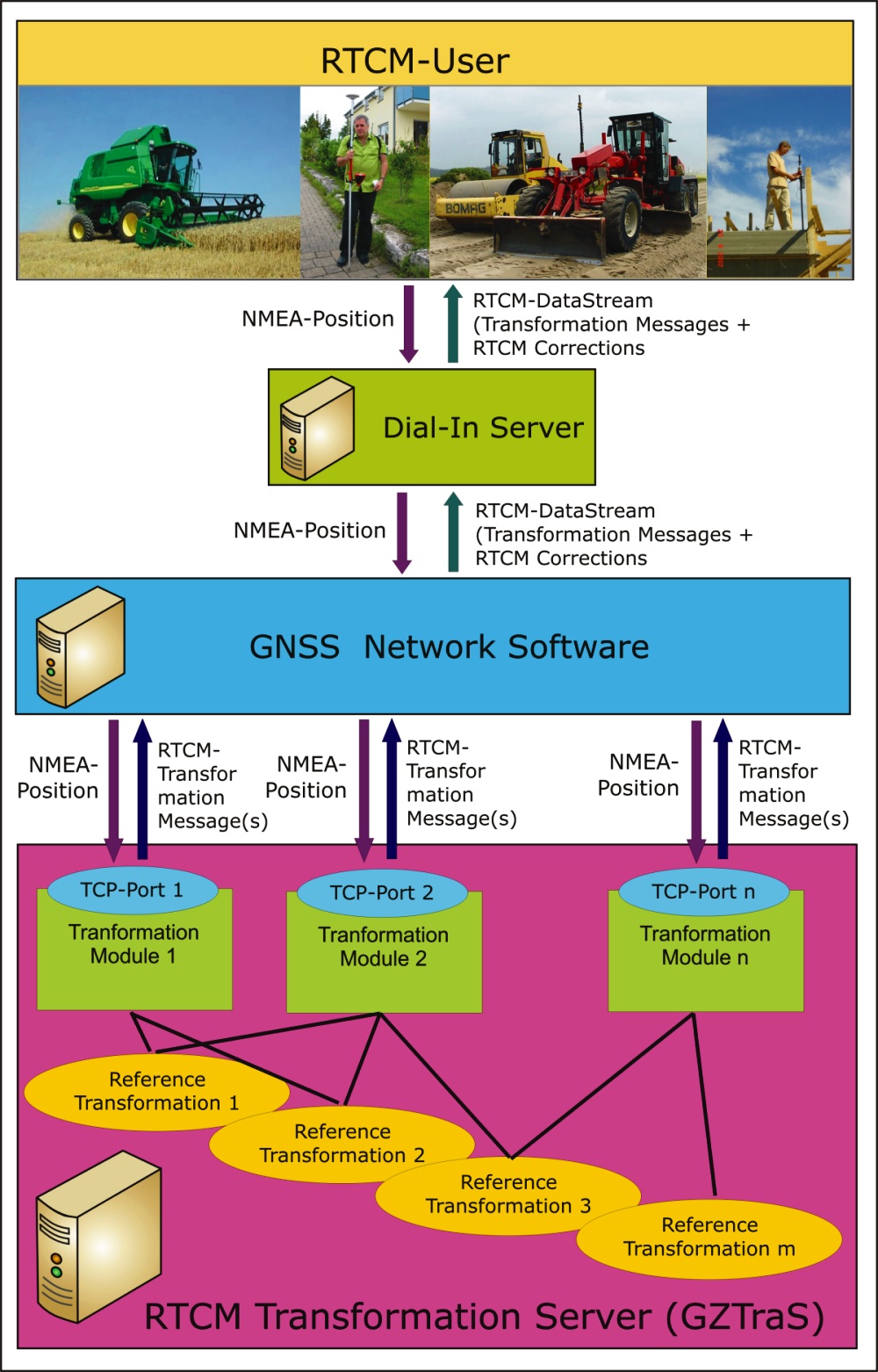
Figure 1: Communication Architecture - GNSS User, GNSS Network and Transformation Server. Click to enlarge image.
Download GZTraS and GZTraC
